背景
手动控制
直接的手动液压控制在工程机械中已使用多年。使用它们需要对机器及其操作特性有高度的熟悉。它们能达到的工作速度和质量在很大程度上取决于操作员的技巧和熟练度。使用手动液压控制时,操作员能从直接反馈中受益,并可以实时调整其工作方式。
液压先导控制
随着滑移装载机、挖掘装载机和紧凑型挖掘机等小型机械的发展,推动了对设计灵活性的更大需求,液压先导控制方案即使在大型机器中也变得普遍。对于这类控制,驾驶室中的一个手柄或操纵杆和先导阀通过先导压力远程操作主控制阀。该技术的常见问题包括精度和重复性差、高滞环(通常为10-25%)、效率低下(由于先导流量),以及在寒冷气候下的反应迟缓。这些缺点使得该技术不够用户友好。
电液 (EH) 控制
随着控制技术的发展,电液控制被广泛采用,因为它解决了一部分——但不是全部——与液压先导控制相关的性能问题,并允许使用更复杂的控制方案。将先导元件移至主控制阀简化了管路,减少了潜在泄漏点,并提高了效率和响应性。电液控制可实现以下功能:
- 调谐/死区补偿
- 控制斜坡
- 负载补偿
- 电子自动调平
- 返回挖掘位置
- 电子油缸缓冲
- 自主控制
虽然电液控制为机器设计师提供了更大的灵活性,但操作员仍然对失去反馈和响应性感到遗憾。
突破:HydraForce 伺服机械式电液控制
在电液控制成功的基础上,HydraForce 的工程师着手通过解决该技术中仍然存在的响应性和重复性问题来改善操作员体验。这些问题的根源在于两个基本因素:
- 多级控制链(操作员输入/电子操纵杆/液压先导级/主控制阀芯)。
- 缺乏位置反馈来闭合控制回路。
电液控制通常会在先导级对控制电流进行闭环控制,但仅控制电流仍然使系统存在变化的可能。
伺服机械式控制
所需要的是一种基于位置反馈的闭环控制。HydraForce 新型的 EHPV90-G33 电液先导阀通过独特的机械反馈机构增强了电液控制。现在,主控制阀芯与先导元件机械连接,就像操作员的手直接连接到手动控制的控制杆上一样。反馈弹簧将阀芯位置传递给先导元件,几乎消除了滞环和死区。
[图片:HydraForce EHPV90-G33 电液先导阀,标有端口 1、2 和 3。]

- 图注标签: PORT 3 (端口3), PORT 2 (端口2), PORT 1 (端口1)
[图片:一个液压原理图,显示一个比例电磁阀通过机械反馈弹簧控制一个主控制阀芯 (MCV SPOOL)。]
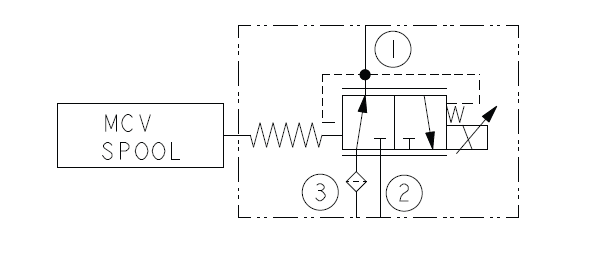
图注标签: MCV SPOOL (主控制阀芯)
成熟技术,更优表现
HydraForce EHPV 基于我们成熟的 EHPR 平台构建。HydraForce EHPR 电液减压阀在整个移动设备行业中为先导装置提供高精度的压力控制。EHPV 增加了机械反馈,可在控制装置和被控装置之间进行信息传递。该配置实现了对被控阀芯的液动力补偿,并允许两端保持受压,从而增强系统刚度并改善行程响应。即使与带 LVDT 位置传感的电液阀相比,EHPV 的表现也同样出色,其滞环低于 3%,响应时间为 65 毫秒。
[图片:一个 EHPV 阀及其内部机械反馈弹簧的分解图。]
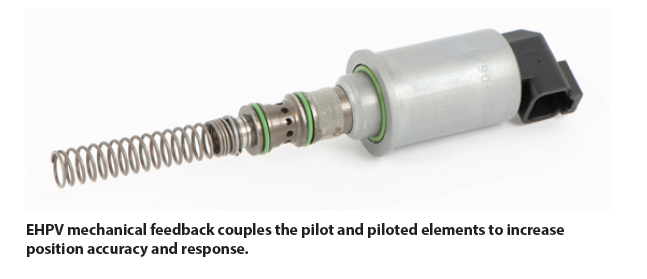
图注: EHPV 的机械反馈将先导元件和被控元件耦合,以提高位置精度和响应速度。
适用于紧凑型装载机的完整主控制阀
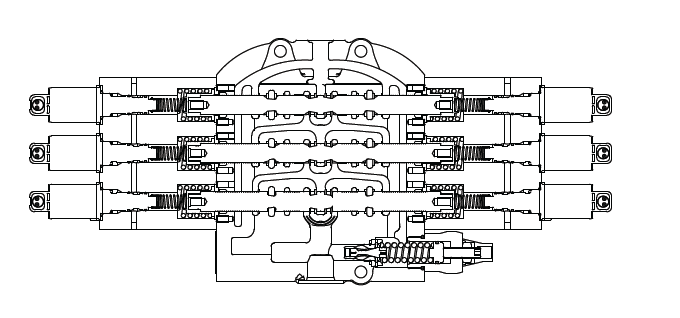
与西班牙巴塞罗那 Roquet Hydraulics S. L. 公司的三联整体式阀配合使用,HydraForce 现在可以为滑移装载机和紧凑型装载机提供完整的主控制解决方案,包括动臂、铲斗和辅助功能。这个完整的主控制器包括用于安全的功能互锁阀、主泵和工作口溢流阀、动臂浮动功能,以及外挂式 PbS® 动臂悬挂。
[图片:一个三联整体式阀的剖面图。]
[图片:一个 HydraForce 液压集成块的实物照片。]
[图片:一辆带有 HydraForce 和 Roquet 标志的蓝色紧凑型装载机。]

使用 PbS® 压力平衡式悬挂保持铲斗内的负载
主控制阀还可以配备 HydraForce 专利的 PbS 压力平衡动臂悬挂。PbS 为紧凑型装载机提供了响应更迅速的负载自适应悬挂。使用专利的 HPB08-E40 外控先导式减压/溢流阀,该悬挂系统能够利用泵流量作为源,而不是从油缸中“窃取”流量,从而动态地将蓄能器压力与铲斗负载相匹配。
[图片:HPB08-E40 压力平衡蓄能器充液阀的实物照片。]
图注: HPB08-E40 压力平衡蓄能器充液阀可适应变化的负载,提供无缝启动并防止油缸漂移。